
 運動機能・鎮痛・薬理
運動機能・鎮痛・薬理

強制的な負荷による疲労やストレステストによりよい手段を提供します。
モータ駆動の走行用ベルトが回転し、内蔵の衝撃周波数帯変換器により複数の制御パラメーターが選択できます。
走行速度を選択し、踏み車傾斜角度を調節して動物を必要な時間走らせることができます。
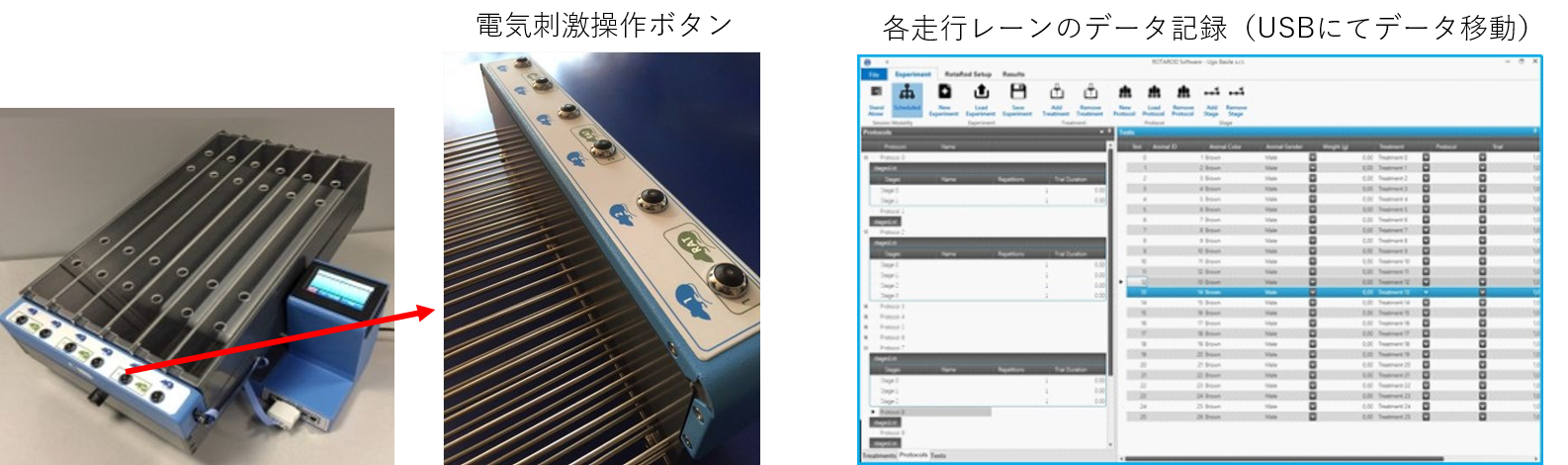
各レーンには電撃提示用グリッドが配備されており、強制的に走行を促すことができます。
各レーンのグリッドへの侵入回数・滞在時間の合計と走行時間・走行距離・走行速度を記録します。
モータ駆動の走行用ベルトが回転し、内蔵の衝撃周波数帯変換器により複数の制御パラメーターが選択できます。
走行速度を選択し、踏み車傾斜角度を調節して動物を必要な時間走らせることができます。
各レーンには電撃提示用グリッドが配備されており、強制的に走行を促すことができます。
各レーンのグリッドへの侵入回数・滞在時間の合計と走行時間・走行距離・走行速度を記録します。
【仕 様】
Speed: 3 to 100m/min, in steps of 1m/min
Shock: 0 to 2mA, 1, 2 or 3Hz
Slope: from -25° to +25°, in steps of 5°
Universal: input 85-264 VAC, 50/60Hz
Dimensions: 56(w)x67(d)x35(h)cm
Weight: Kg 22-27 (with 1 or 2 lane assy)
←「ラット・マウス用カテーテル(頸動脈・頸静脈・大腿動脈・大腿静脈)ラット髄腔内」前の製品へ 次の製品へ「動物用 走行運動負荷装置 ( トレッドミル )」→

